
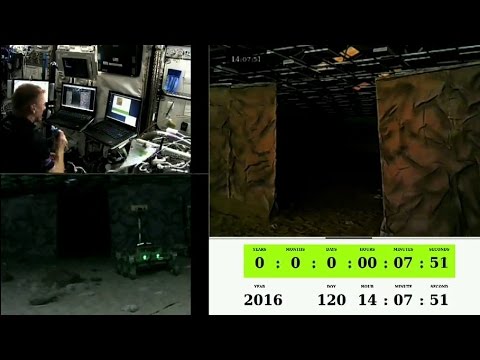
Putting a round peg in a round hole is not hard to do by someone standing next to it. But on 7 September 2015 ESA astronaut Andreas Mogensen did this while orbiting 400 km up aboard the International Space Station, remotely operating a rover and its robotic arm on the ground.
Andreas used a force-feedback control system developed at ESA, letting him feel for himself whenever the rover’s flexible arm met resistance.
These tactile sensations were essential for the success of the experiment, which involved placing a metal peg into a round hole in a ‘task board’ that offered less than a sixth of a millimetre of clearance. The peg needed to be inserted 4 cm to make an electrical connection.
Andreas managed two complete drive, approach, park and peg-in-hole insertions, demonstrating precision force-feedback from orbit for the very first time in the history of spaceflight.
The Interact Centaur rover used in the experiment was based at ESA’s technical centre ESTEC in Noordwijk, the Netherlands. It was designed and built by ESA’s Telerobotics & Haptics Laboratory in collaboration with graduate students from Delft University of Technology.
The Interact experiment is a first step towards developing robots that provide their operators with much wider sensory input than currently available. In this way, ESA is literally ‘extending human reach’ down to Earth from space.
Read more on the ESA Portal:
http://www.esa.int/Our_Activities/Space_Engineering_Technology/Slam_dunk_for_Andreas_in_space_controlling_rover_on_ground



Leave a Reply