On 29 April 2016, ESA astronaut Tim Peake on the International Space Station took control of a rover, nicknamed ‘Bridget’, in the UK and over two hours drove it into a simulated cave and found and identified targets despite the dark and limited feedback information.
Before and after Tim came online from the orbiting Station, control of the rover was passed several times between engineers at the Airbus D&S ‘Mars Yard’ in Stevenage, UK, Belgium’s ISS User Support Centre in Brussels and ESA’s ESOC operations centre in Darmstadt, Germany. This complex real-time choreography was possible thanks to the ‘Internet in space’ – a network that tolerates disruptions – put in place by teams at ESOC. This network enables remote control of rovers or other devices in the difficult environment of space, with its long distances and frequent connection blackouts inevitable with orbital motion.
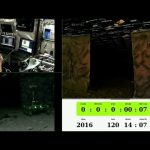
During the experiment, a representative mission scenario was set up in which the rover was commanded to go from a lit environment into a challenging dark location (simulating a cave or a shaded crater) and identified a number of science targets. The Mars yard (30 x 13 m) was split into two areas, one lit and one in the dark. From one end of the yard, Bridget was commanded from ESOC until it reached the edge of the shaded area. Then at the edge of the ‘cave’, control was passed to astronaut Tim Peake, on board the Station, who controlled Bridget to drive across the yard, avoiding obstacles and identifying potential science targets, which were marked with a distinctive ultraviolet fluorescent marker. Once the targets were identified and mapped, Tim drove the rover out of the shaded area and handed control back to ESOC, who drove the rover back to its starting point.
This video is a compressed extract that includes highlights of the experiment and includes scenes of the network control centre at ESOC, the Mars Yard at Stevenage and Tim Peake on the ISS. On audio, the voices of astronaut Time Peake, Lionel Ferra, the Eurocom ‘capcom’ controller at ESA’s Astronaut Centre in Cologne, Germany, and Kim Nergaard, the ground segment manager at ESOC, can be heard periodically.
More information
https://www.flickr.com/photos/esa_events/albums/72157667946502135




Leave a Reply